>> 參考資料
如上圖示
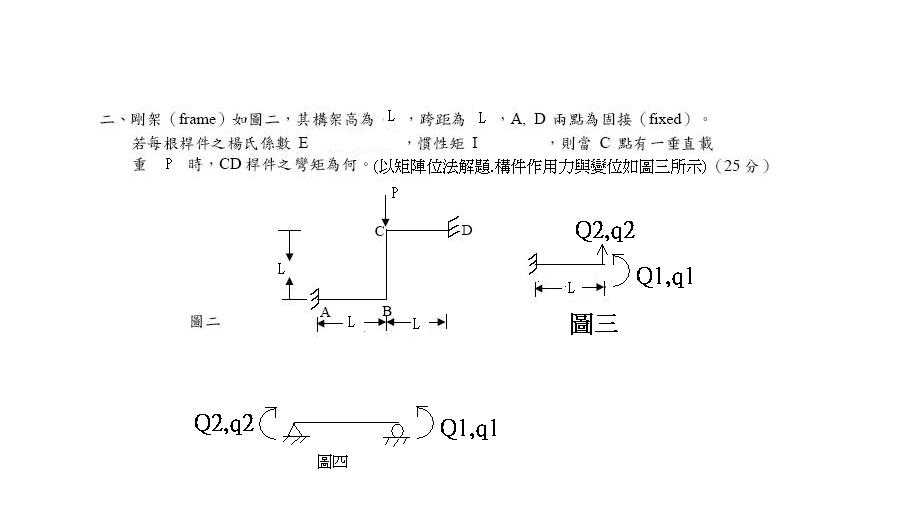
自由度`r_1`方向與`q_1`相同,`r_2`方向與`q_2`相同
外力`{(R_1),(R_2)]={(0),(-P/2)]`
已知小[k]=EI/L*`{(4,-6/L),(-6/L,12/(L^2))]`
`a_(ij)`定義為:j方向自由度1單位變位轉角時,i方向產生的內變位轉角
那麼[a]=`{(1,0),(0,-1/L)]`
大[K]=`[a]^T*[k]*[a]=(EI)/L*{(4,6/L),(6/L,12/(L^2))]`
`{(r_1),(r_2)]=[K]^(-1)*[R_i]={((PL^2)/(4EI)),(-(PL^3)/(6EI))]`
與圖四,設簡支梁構件內力與轉角`Q_1,q_1,Q_2,q_2`
所得的正確變位轉角`{r_i}={((PL^2)/(12EI)),(-(PL^3)/(12EI))]`及桿端力矩`{Q_i}`都不同
所以我想問懸臂梁[a]矩陣哪裡錯了呢?
請老師或各位大大賜教,謝謝老師及各位大大~(跪拜禮new)
加入土木人討論區粉絲團


